It's purpose is to transfer movements of an analog computer joystick into servo motion.
It allows the user precise control of three R/C servos using an analog joystick, steering wheel or other control that simulates the PC joystick input.
Since the data between the joystick and the servos is asyncronous serial, the servo end can be located almost anywhere serial data can be sent, either through a cable or wireless connection.
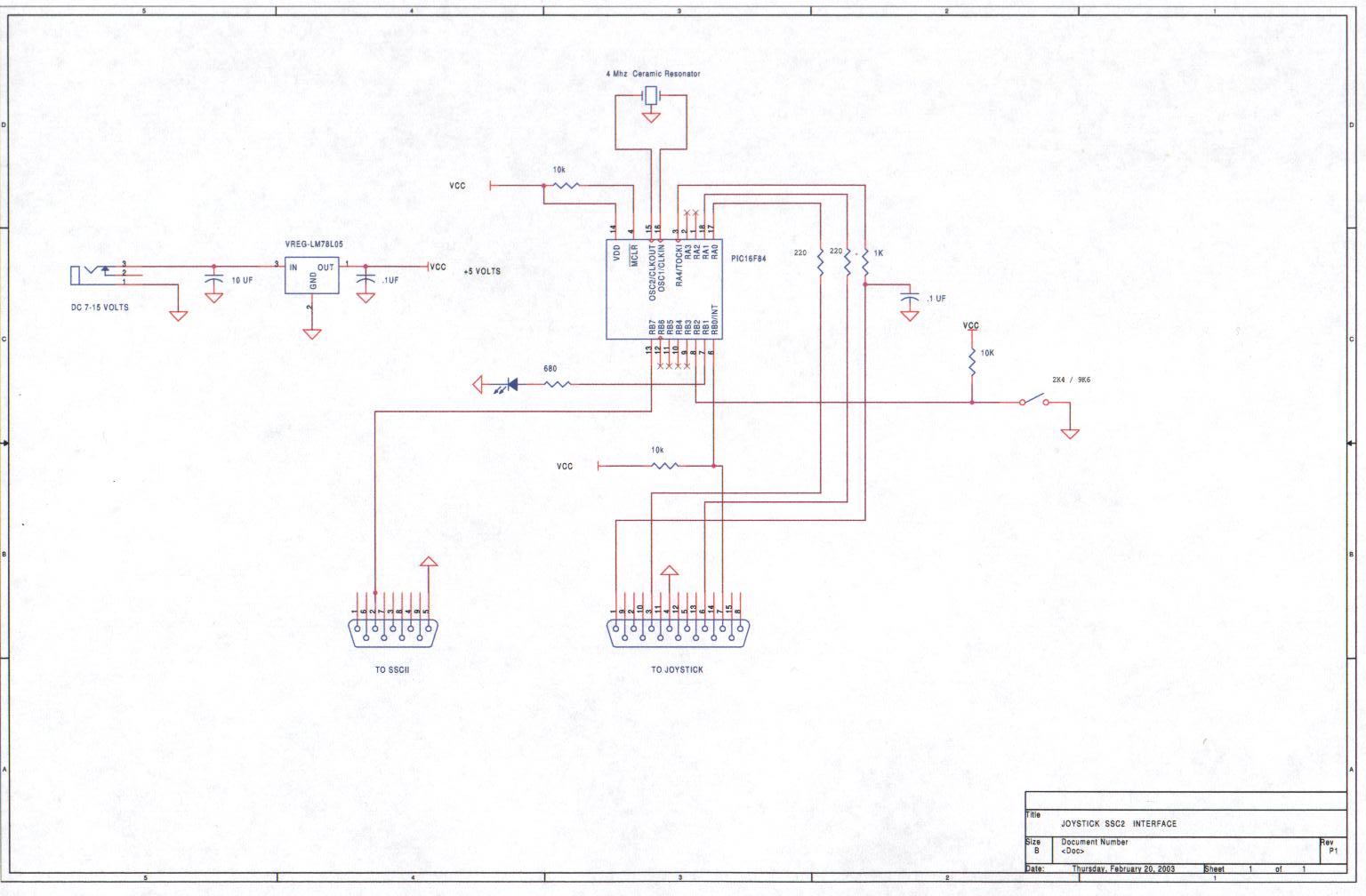
The interface has user selected data speeds of either 2400 or 9600 baud which matches the SSC2.